‘Smellicopter’ drone uses live moth antenna to seek smells, avoid obstacles
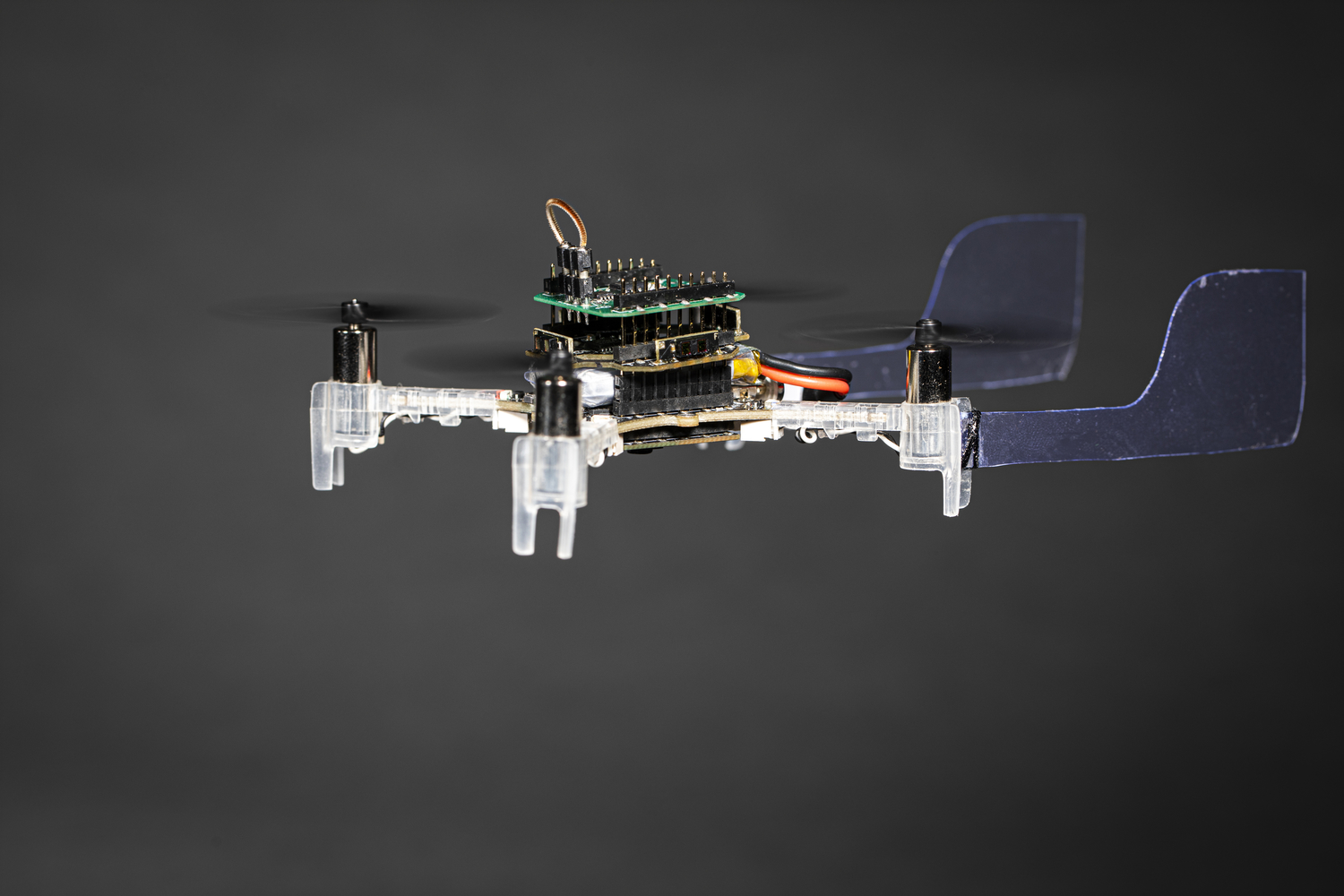
Researchers from the University of Washington and the University of Maryland associated with the Air Force Center of Excellence on Nature-Inspired Flight Technologies and Ideas (NIFTI) have developed “Smellicopter,” an autonomous drone that uses a live antenna from a moth to navigate toward smells. Smellicopter also can sense and avoid obstacles as it travels through the air. The results were recently published in the journal IOP Bioinspiration & Biomimetics. NIFTI, established by the Air Force Office of Scientific Research in 2015 with $9 million of funding, is creating solutions for challenging problems related to small, remotely operated aircraft with ideas based on how animals move, navigate and use their senses. The Clark School currently has four faculty involved in NIFTI efforts. Professor Pamela Abshire (ECE/ISR) is one of the five NIFTI leads. She is joined by Professor Nuno Martins (ECE/ISR), Professor Miao Yu (ME/ISR) and ISR-affiliated Associate Professor Timothy Horiuchi (ECE). Horiuchi is one of the authors of “A bio-hybrid odor-guided autonomous palm-sized air vehicle,” the paper that introduces the Smellicopter. Other authors include Melanie Anderson, Joseph Sullivan, Sawyer Fuller and Thomas Daniel, all from the University of Washington (UW). About Smellicopter Drones hold great potential for performing tasks in difficult, dangerous places, including search and rescue in unstable structures following a natural disaster or navigating a region with unexploded devices. To assist in these tasks, researchers are developing technology for drones that can sense chemicals in the air. But most artificial sensors are not sensitive or fast enough to be able to find and process specific smells while flying through patchy odor plumes. Smellicopter takes a different approach to get around these limitations by incorporating a live antenna from a moth as a sensor. "Nature really blows our human-made odor sensors out of the water," said lead author Anderson, a UW doctoral student in mechanical engineering. "By using an actual moth antenna with Smellicopter, we're able to get the best of both worlds: the sensitivity of a biological organism on a robotic platform where we can control its motion." Moths use their antennae to sense chemicals in the environment and navigate toward sources of food or potential mates. "Cells in a moth antenna amplify chemical signals," said Daniel, Anderson’s advisor. "The moths do it really efficiently — one scent molecule can trigger lots of cellular responses, and that's the trick. This process is super efficient, specific and fast." The team used antennae from the Manduca sexta hawkmoth for Smellicopter. Researchers placed moths in the fridge to anesthetize them before removing an antenna. Once separated from the live moth, the antenna stays biologically and chemically active for up to four hours. That time span could be extended, the researchers said, by storing antennae in the fridge. By adding tiny wires into either end of the antenna, the researchers were able to connect it to an electrical circuit and measure the average signal from all of its cells. The team then compared it to a typical human-made sensor by placing both at one end of a wind tunnel and wafting smells that both sensors would respond to: a floral scent and ethanol, a type of alcohol. The moth antenna reacted more quickly and took less time to recover between puffs than the artificial sensor. To create Smellicopter, the team added the antenna sensor to a small, open-source, customizable quadcopter. The researchers also added two plastic fins on the back of the drone to create drag to help it be constantly oriented upwind. "From a robotics perspective, this is genius," said co-author Fuller. "The classic approach in robotics is to add more sensors, and maybe build a fancy algorithm or use machine learning to estimate wind direction. It turns out, all you need is to add a fin." "This flight controller allows the tiny drone to freely rotate on the yaw axis like a wind-vane and the quadcopter can pitch forward to fly upwind," said UMD’s Horiuchi. Smellicopter can conduct the search for odors on its own. The team created a "cast and surge" protocol for the drone that mimics how moths search for smells. Smellicopter begins its search by moving to the left for a specific distance. If nothing passes a specific smell threshold, Smellicopter then moves to the right for the same distance. Once it detects an odor, it changes its flying pattern to surge toward it. Smellicopter is naturally tuned to fly toward smells that moths find interesting, such as floral scents. But researchers hope that future work could have the moth antenna sense other smells, such as the exhaling of carbon dioxide from someone trapped under rubble or the chemical signature of an unexploded device. Detecting the source of a smell’s plume is a perfect task for a tiny drone. All it needs to do is avoid obstacles and stay in the plume while it moves upwind. A quadrotor that is great at smelling is perfect for the job. Smellicopter is an advance in pairing biology with robotics, Horiuchi noted. "We are constantly learning new ways in which robots equipped with the physical body of biological organisms can "collaborate with the nervous system" to solve a whole range of problems needed for them to compete and survive in the world." —We are grateful to Sarah McQuate of the University of Washington, who wrote and shared with us the original version of this story.
Related Articles: December 8, 2020 Prev Next |