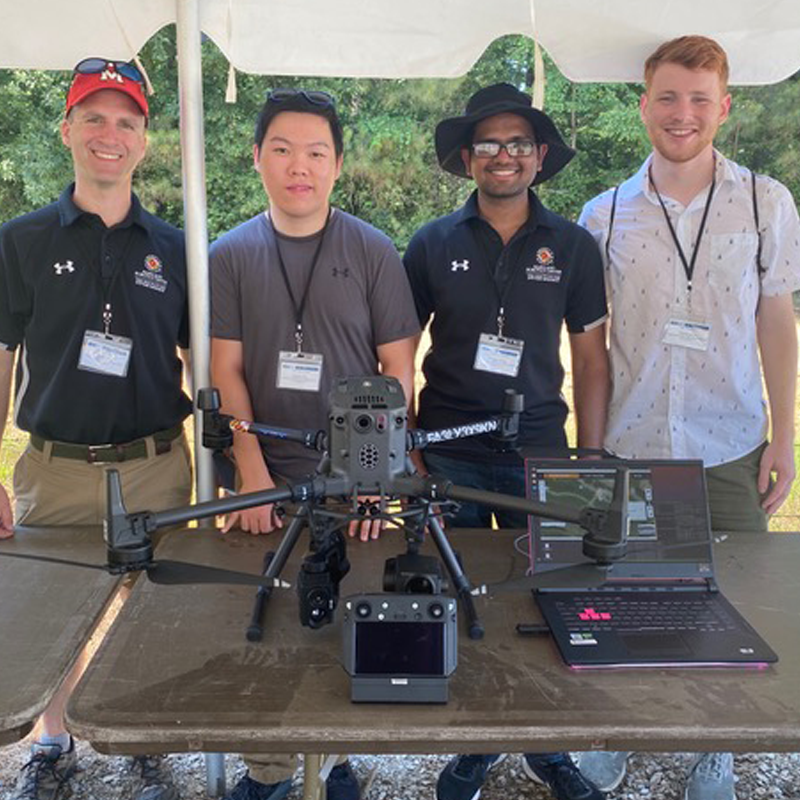
UMD Team Wins Inaugural NIST UAS 3.1: FastFind Challenge
A team of University of Maryland students won first place in the National Institute of Standards and Technology (NIST) Public Safety Communications Research Division’s (PSCRD) inaugural First Responder UAS Triple Challenge 3.1: FastFind Competition. The competition challenged participants to develop an unmanned aerial vehicle (UAV) system that could “increase the speed of search and rescue operations where direct visual contact with a potential subject may be obscured.” In recent years, first responders have begun leveraging UAS technology to improve response capabilities for search and rescue operations while providing systems that also improve the safety for deployed personnel. Led by Animesh Shastry, an aerospace engineering fourth-year aerospace engineering Ph.D. student, the team—part of Maryland’s Autonomous Micro Air Vehicle (AMAV) Team—worked over the past year to develop custom software that not only improved their UAV’s ability to detect individuals lost in heavily forested environments, but also offered a creative open-source solution with expanded options. “Most SAR applications are proprietary and developed in Android/iOS SDK,” explained Wei Cui, a second-year aerospace engineering Ph.D. student, who led the team’s development of their custom software. "We developed a better user interface (UI) in React, a JavaScript library, enabling our application to run on a regular laptop that offers a bigger screen and is more powerful to support more sophisticated machine learning and image processing algorithms.” The team also leveraged a You Look Only Once (YOLO) classifier—a state-of-the-art deep neural network in object detection—which according to them can achieve better-than-human performance with sufficient training. “The target locations and images are auto-saved by our application into the database in no time,” Shastry added. “As far as we know, no current SAR application can achieve such efficacy. In addition, by using machine learning and computer vision algorithms we could empower first responders to detect missing personnel quickly and efficiently. Current SAR applications that run on iOS/Android do not have the computation resources to run these types of state-of-the-art algorithms.” To put student’s concepts to the test, NIST hosted finalists at a remote forest location in Mississippi where they held search and rescue scenarios to see how the teams’ technologies faired. In typical search and rescue scenarios, UAVs are used to extend the vision of the ground searchers. High probability areas are scouted with a UAV, and then rescue teams can be deployed to areas of interest. “When a missing person is likely to be anywhere over a large area, flight routes are pre-programmed using “lawnmower” or “spiral” patterns,” explained Shastry. “A search volunteer or ground personnel actively scans the UAV’s video feed and looks for patterns or colors that contrast with the surrounding background, but this can be slow, tedious, lead to mental and physical fatigue, and subsequently lead towards false identification. Our technology, which uses computer-assisted person identification methods, is meant to replace manual methods by being fast, accurate, easy to use and cost-effective.” Beyond the technology the team developed in advance of competition, they also found themselves refining ideas on the fly during flights as they learned more about the realities of SAR’s operations on the ground in Mississippi. “We discovered that focusing our search efforts around strategic terrain features such as roads, trails, and areas accessible by humans will allow us to find missing people quickly and efficiently,” explained Shastry. “The technique of using terrain features wasn’t a part of our original idea, but we introduced it during the competition.” Since UAVs have an average flight time of only 30 to 40 minutes, this approach helped the team enable their flights to be much more efficient during their limited flight time. “We learned that in such stressful rescue missions every second counts and that it can be a matter of life and death,” Shastry said of the team’s experience in Mississippi. “We learned about the importance of working in this field and the impact that UAV technology can have on people’s lives.” As part of their competition win, which also included a First Responder’s Choice Award, the team received $60 thousand in cash prizes which will help support the AMAV team as they gear up to compete in the next NIST competition—the 2022 First Responder Unmanned Aircraft System (UAS) Indoor Challenge. This challenge will be to design, prototype and test a cost-effective UAV solution for indoor SAR missions. The Autonomous Micro Air Vehicle (AMAV) Team is mentored by Professor Derek Paley (AE/ISR), and this project included three undergraduate and three graduate students. The team regularly competes in a variety of annual Design-Build-Fly competitions focused on leveraging small-scale vertical flight and unmanned aerial vehicles. Part of NIST’s PSCDRD Open Innovation Prize Challenges, this competition focuses on advancing public safety communications by leveraging the creativity, expertise and innovative solutions from a diverse array of contributors and collaborators across the globe through financial awards and incentive-based activities. Watch an overview of this year's challenge (Source: NIST).
Related Articles: July 21, 2022 Prev Next |
|